

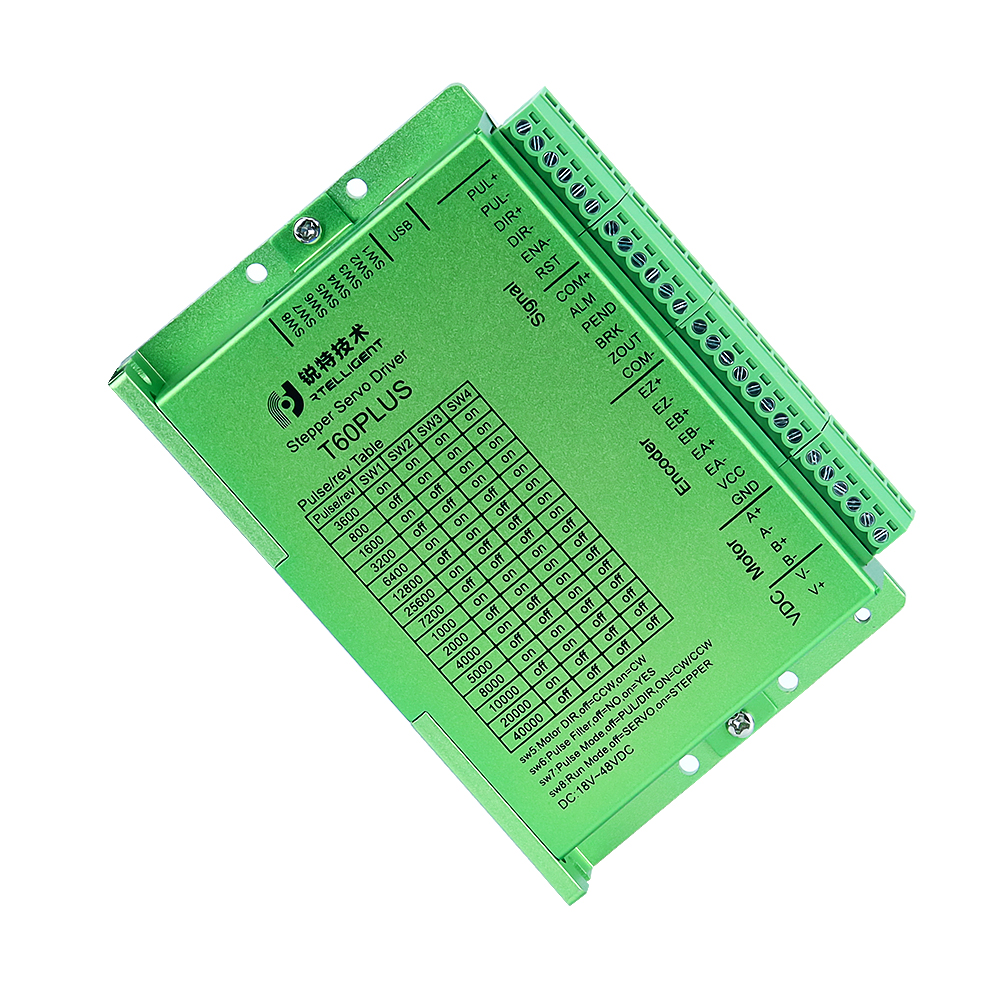


Darbe Kontrollü 2 Fazlı Kapalı Döngü Adım Motoru Sürücüsü T60Plus


Ürün Tanıtımı



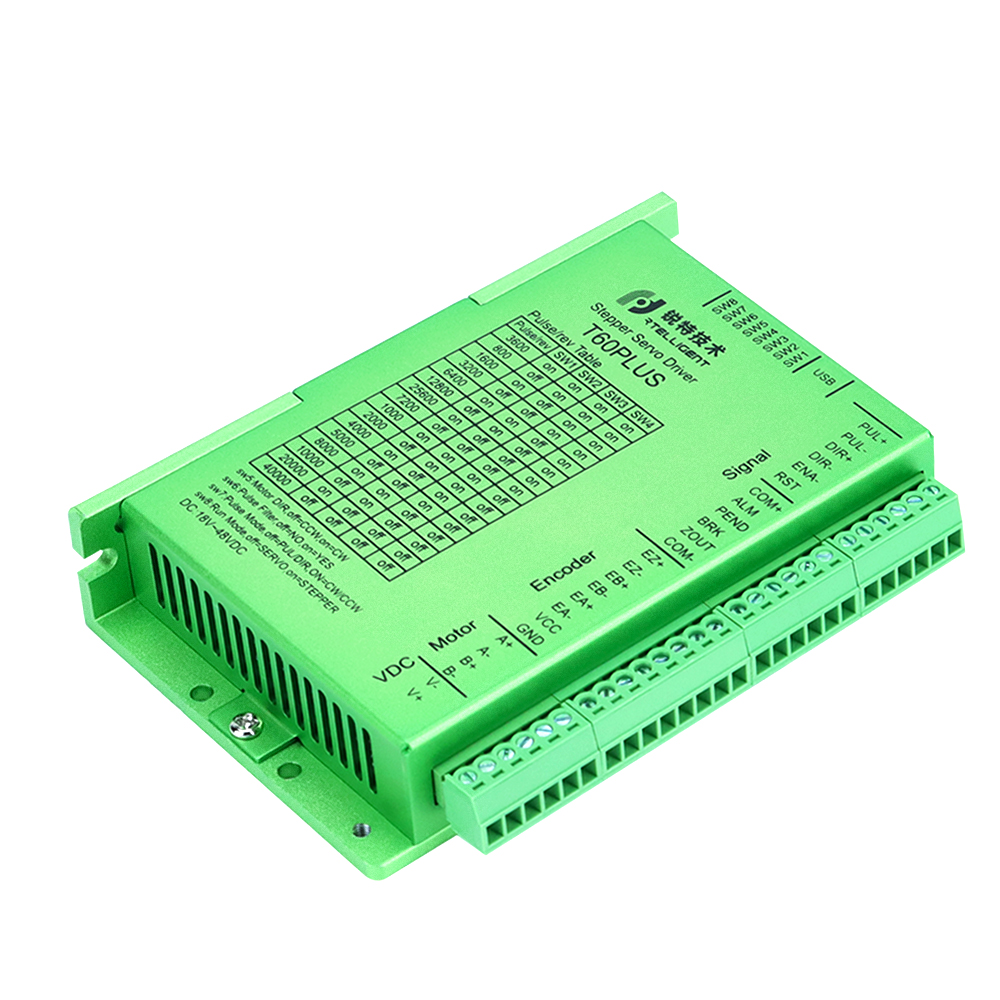
Bağlantı

Özellikler
| Güç kaynağı | 18~48VDC |
| Kontrol hassasiyeti | 4000 Nabız/dev |
| Nabız modu | Yön ve darbe, CW/CCW çift darbe, A/B kare darbe |
| Akım kontrolü | Servo vektör kontrol algoritması |
| Alt bölüm ayarı | DIP switch ayarı, 15 seçenek (veya hata ayıklama yazılımı ayarı) |
| Hız aralığı | Geleneksel 1200~1500rpm, 4000rpm'ye kadar |
| Rezonans baskılaması | Orta frekanslı titreşimi bastırmak için rezonans noktasının otomatik hesaplanması |
| PID parametre ayarı | Motor PID özelliklerini ayarlamak için hata ayıklama yazılımı |
| Darbe filtresi | 2MHz dijital sinyal filtresi |
| Alarm çıkışı | Aşırı akım, aşırı gerilim, pozisyon hatası vb. için alarm çıkışı. |
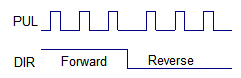
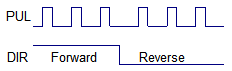
Nabız Modu
Standart T serisi sürücünün sinyal arayüzü darbe şeklindedir ve T60PLUS V3.0 üç tip darbe komut sinyali alabilir.
| Nabız ve yön (PUL + DIR) |
|
| Çift darbe (Saat yönünde +saat yönünün tersine) |
|
| Ortogonal darbe (A/B ortogonal darbe) | 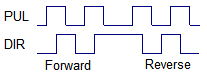 |
Mikro adımlama ayarı
| Nabız/devir | SW1 | SW2 | SW3 | SW4 | Notlar |
| 3600 | on | on | on | on | DIP switch “3600” konumuna getirilir ve test yazılımı diğer alt bölümleri serbestçe değiştirebilir. |
| 800 | kapalı | on | on | on | |
| 1600 | on | kapalı | on | on | |
| 3200 | kapalı | kapalı | on | on | |
| 6400 | on | on | kapalı | on | |
| 12800 | kapalı | on | kapalı | on | |
| 25600 | on | kapalı | kapalı | on | |
| 7200 | kapalı | kapalı | kapalı | on | |
| 1000 | on | on | on | kapalı | |
| 2000 | kapalı | on | on | kapalı | |
| 4000 | on | kapalı | on | kapalı | |
| 5000 | kapalı | kapalı | on | kapalı | |
| 8000 | on | on | kapalı | kapalı | |
| 10000 | kapalı | on | kapalı | kapalı | |
| 20000 | on | kapalı | kapalı | kapalı | |
| 40000 | kapalı | kapalı | kapalı | kapalı |
Mikro adımlama ayarı
Sürücü terminalleri yanmış mı?
1. Terminaller arasında kısa devre varsa, motor sargısında kısa devre olup olmadığını kontrol edin.
2. Terminaller arasındaki iç direnç çok büyükse lütfen kontrol edin.
3. Teller arasındaki bağlantıya aşırı lehimleme eklenerek lehim topu oluşturulur.
Kapalı devre step motor sürücüsünde alarm var mı?
1. Kodlayıcı kablolamasında bağlantı hatası varsa, lütfen doğru kodlayıcı uzatma kablosunu kullandığınızdan emin olun veya başka nedenlerle uzatma kablosu kullanamıyorsanız Rtelligent ile iletişime geçin.
2.Enkoderin sinyal çıkışı gibi bir hasar olup olmadığını kontrol edin.
-
 Rtelligent T60PLUS V3.0 Kullanıcı Kılavuzu
Rtelligent T60PLUS V3.0 Kullanıcı Kılavuzu




